
von: Prof. Dr. Maik Büssing
Das autonome Fahren im Straßenverkehr ist eines der Schwerpunktthemen in der Fahrzeugtechnik. Nicht weniger wichtig ist aber auch das autonome Fahren bei der innerbetrieblichen Logistik. Häufig gilt der Gabelstapler noch immer als das flexibelste und universell einsetzbarste Fördersystem am Markt. Nicht berücksichtigt werden dabei häufig die Transportkosten je Kilometer, die insbesondere aufgrund der Personalintensität deutlich höher wie bei anderen Transportsystemen sind.
Zur Reduzierung dieser Kosten werden bereits seit langem fahrerlose Transportsysteme (FTF) eingesetzt, die in der Vergangenheit aber wiederum Nachteile insbesondere bei der Flexibilität mit sich brachten. So war es häufig nicht möglich, viele unterschiedliche Arbeitsplätze individuell über Transportaufträge anzusteuern, so dass Material schnell zu den Mitarbeitern transportiert werden konnte. Eng damit verbunden ist auch die Betriebssicherheit durch diese Transportsysteme; sprich vor allem der Kollisionsschutz gegenüber Personen, Material oder anderen Transportsystemen. Wichtige Elemente sind dabei Brems-, Ausweich- und Umfahrungsfunktionen, um so Kollisionen zu verhindern.
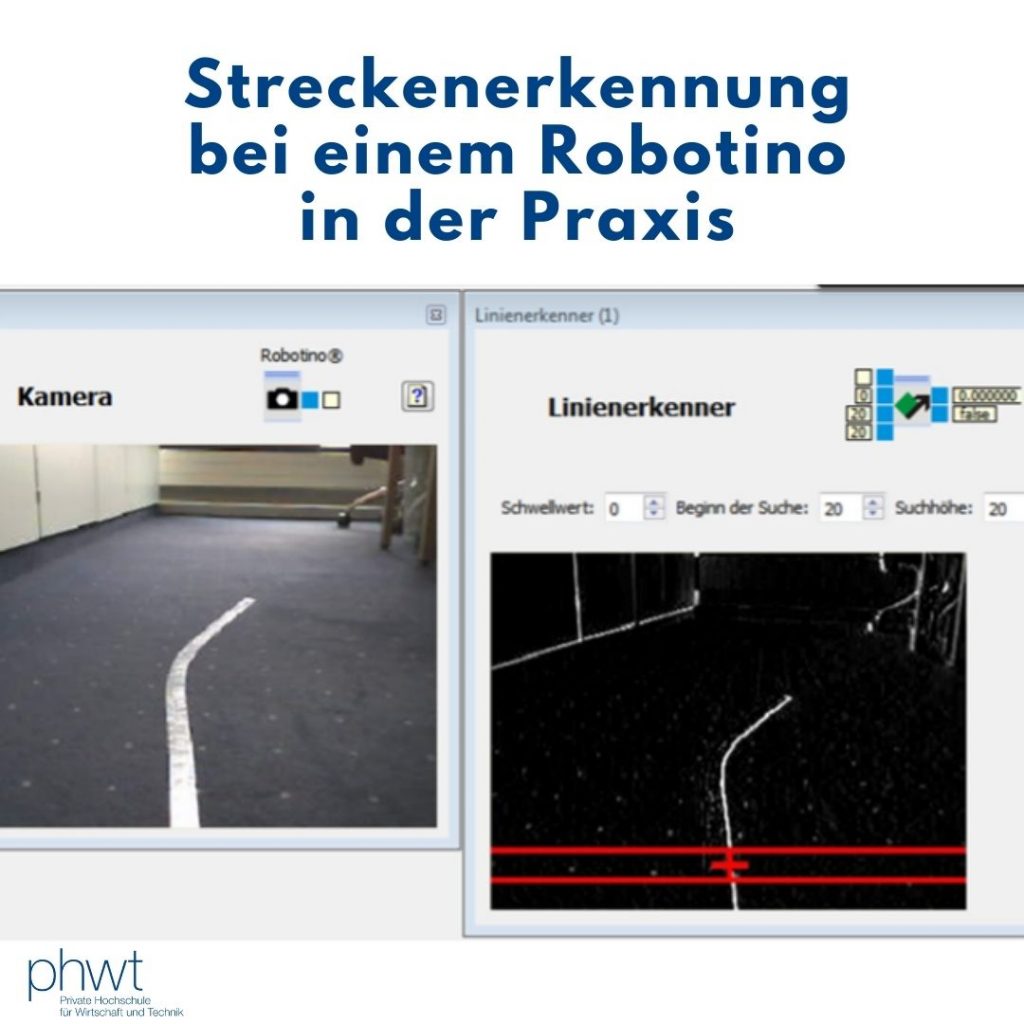
Um diese Problemstellungen weiterzuentwickeln und praxistauglich umzusetzen, hat die Firma FESTOOL das „Robotino“-System entwickelt. Dieses System soll es Hochschulen, wie Unternehmen ermöglichen, unterschiedliche Anforderungen an ihr Transportsystem zu formulieren, um diese dann in einer Simulation sowie in der praktischen Anwendung realisieren zu können. Die Simulation ermöglicht durch die Darstellung von unterschiedlichen Umgebungen sowie das spontane Auftauchen von Hindernissen, die Optimierung der Transportprogramme, um ein wegeoptimiertes und kollisionsfreies Arbeiten ermöglichen zu können. Dabei können feste Transportstrecken ebenso abgearbeitet werden, wie auch hochflexible Strecken, die mittels Transportaufträgen an das Fördersystem gemeldet werden.
Der Roboter erfasst dabei mit unterschiedlichen Sensoren seine Umgebung und kann somit unterschiedliche Arten von Hindernissen erkennen. Ihm stehen hierbei sowohl Kameras wie auch Infrarot- und Ultraschallsensoren zur Verfügung, die es ermöglichen, unterschiedliche Materialien auf unterschiedlichen Entfernungen zu erfassen. Ferner ermöglichen die Omni-Antriebe der mobilen Roboter ein freies Bewegen im Raum sowie eine Rotation um die eigene Achse, so dass Hindernisse direkt nach der Erkennung ohne langwierige Rangierfahrten umfahren werden können.


